
广林同学



- 全站推荐
- 全站置顶
- 撤销首页推荐
- 社区推荐
-
置顶推荐
- 6小时
- 12小时
- 24小时
- 3天
- 一周
- 长期
- 设为精华
- 热门推荐
- 撤销审核
- 进小黑屋
- 生成议题
回顾 2024 年度中国新能源汽车市场,整个市场主线基本也是围绕着“智能化”一词而展开;而智能化包括了车机、智驾等等领域,而我们今天就来和大家回顾一下 2024 年度中,中国新能源汽车的智能化市场究竟发生了什么变化。
目录:
- 智能座舱的再次“Ai 大爆炸”
大屏成为主流
多任务桌面上车
SR 界面持续丰富 - 智驾进阶的转折点
新的智驾敲门砖——全国可用
“端到端”——辅助驾驶的聪明版
高阶智驾试金石——车位到车位
智能座舱的再次“Ai大爆炸”
大横屏成为主流
- 屏幕在智能化时代承载的意义?
车机作为当下新能源汽车人机交互所必经的媒介与载体,像是按键手机到触摸手机再到语音控制的进步过程。演变至今,一个车机小屏幕更像是座舱的灵魂。通过它,我们能了解车甚至了解自己......
最初特斯拉就是通过一整块中控屏幕来完成了智能座舱的构思和开端。像 Model 3 上面就是用了一款 15 英寸的中控横屏集成了智能语音、仪表显示、地图等等信息,实现了一屏多用。

但随着时间的推移这也慢慢有了一些大胆的创新..例如我们也体验过一些竖屏布局的产品,它能够分离出更多画面内容,例如导航与媒体的操控,能在同一时间呈现在一个界面上。

为了满足更多场景应用,概念百花齐放,为了科幻时尚的座舱氛围带来了超长横屏、为了兼顾家人的舒适乘坐体验带来了主副驾的双连屏等各种奇思妙想“应运而生”。但发展往往会不断趋向于合理,大横屏的车机形式直至今日也仍然为众多车企的首选。

多任务桌面上车
- 何为多任务桌面
传统的车机 UI 界面有着明显的主次层级之分,如今面对着数以百计的 APP 小程序,操作也慢慢变得繁杂。既要满足个性化需求,又要让车主本身获得更多体验的同时能获得更舒适的便利性这就成为了关键。
- 多形态桌面
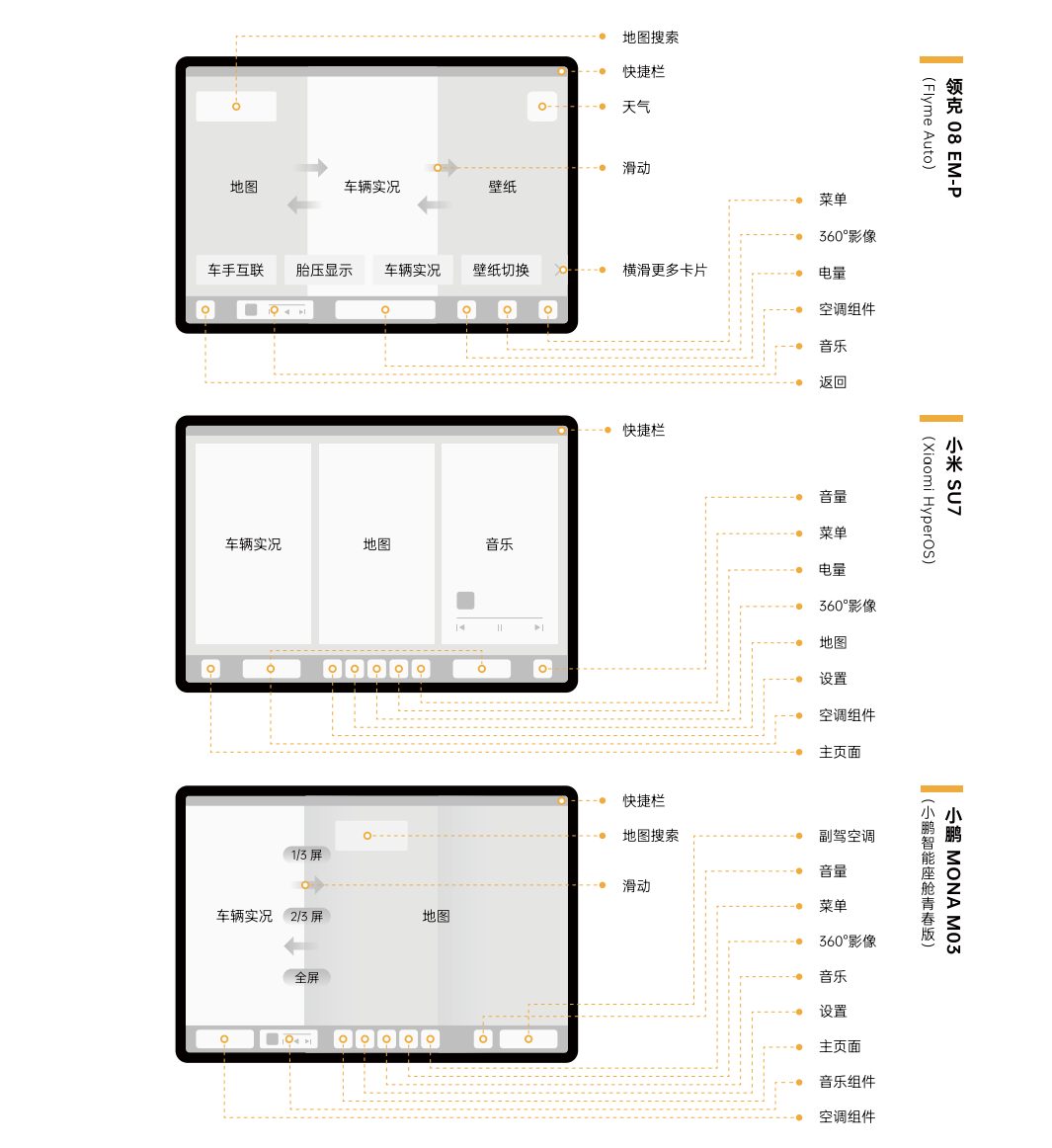
魅族的 FlymeAuto 最初提出这种设计方案,针对市面上主流的壁纸桌面、实况界面、地图桌面多模式自由切换。驾驶员可以把自己常用界面作为主页场景来提高便利性,这也是全球首家支持三模式界面切换和自定义的车机系统。

- 多卡片页面
除了在主页场景做文章外,小米 SU7上的澎湃·OS 它取消了桌面壁纸,而是更直接地采用了 3D 车控实况界面来增强功能性。同时它还引入了多任务卡片界面,在这个界面中它可以依据主次程度随意切换卡片比例还可以在同一时间完成多场景应用。

- 多权重自定义卡片(天玑系统)
卡片使用权重上做自定义设计,例如天现系统会根据卡片的类型不同以及你使用的频率可以自定义界面的大小;把卡片之间的中轴往两侧拖拽以实现不同的卡片比例,但同时又保留了多卡片的内容,非常随心所欲。

SR 界面持续丰富
- 提高驾驶员安全感
首先我们要知道,通过车机端的 SR 界面我们就能看到非常多关于辅助上的信息其中包括行人,桩桶,道路标线等等。而SR 界面能够展现人与车驾驶的边界和责任划分,实现准确的风险场景识别以及清晰的警醒提示,对驾驶员来说就会非常安心。

- 场景辅助性增强
现在 SR 界面除了能感受周边大环境外还能针对行驶中的具体情况形象化,对驾驶员提供帮助:例如泊车场景,在 SR 的世界里会把你的车与车位进行 3D 渲染从而让新手司机更好从这个虚拟的现实场景中完成泊车流程。

- 算法能力的展示
大家都知道国内的道路状况信息容量是非常大的。我们的硬件识别到之后 SR 界面能否清晰显示和判断都对整个智能座舱的“评分体验”至关重要。如小鹏 MONA M03 采用的也是大屏幕 SR 的智驾交互界面。今年华为 ADS 3.0 也把地图指引兼容进了 SR 界面之中。
智驾进阶的转折点
新的智驾敲门砖——全国可用
智驾方面,今年车企们主要的“奋斗区域"还是聚焦在全国 NOA 上面。但可以看到部分主流智驾品牌均在年内达成了全国可用的“成就”。在场景化方面的能力对比之前有了很大的提升,而接下来更多的技术进展将会围绕车位到车位展开。

“端到端”——辅助驾驶的聪明版
- 什么叫做端到端
在之前的一段时间里我们常常都在说高速 NOA、城区 NOA 如何如何,但今年我们听得比较多的一个词反而是“端到端”,那端到端究竟是什么?

在这里先要和大家解释的是,端到端全称“端到端大模型”,这是一项技术,而高速 NOA 与城区 NOA 它们更多是像场景。
在端到端这项技术之前,我们的智能辅助驾驶系统所呈现出来的能力其实是通过硬件、感知、预测、规划、执行这一大串流程完成的。但融合端到端大模型之后所呈现出来的能力就变成了硬件、端到端大模型、执行三个步骤。

- 端到端在智驾上带来的优势
1、更快速的处理能力
从字眼上就可以感受到这项技术带来的直接好处,那就是减少了繁杂的步骤,大大降低了系统算法延迟:这就好比如你让机器人做饭,你要依次让它加盐、加油、加大火、端菜......但是在加入端到端后、机器人会自己领悟剩下的内容,省去“命令”的过程。
2、更强的自主学习能力
另外,端到端拥有更强的自主学习能力:上限能力很高。例如之前我们的智能辅助驾驶需要按预设的规则来进行避让、超车、绕行等等动作。但是加入端到端大模型之后,它会根据硬件传感器接收的信息作出自主反应,分析更多执行的可能或路线后续也会慢慢记忆养成这种情况加快判断速度,也就是“想法更多,能力更强了”。
3、更安全
在复杂场景中,有一些物品可能是在日常的训练数据中不太常见的,要求对模型要有丰富的阅历,端到端大模型可以通过这种名为 VLM 的视觉语言大模型接入智能驾驶系统。简单来说就是该模型学习了来自互联网的海量信息,让它具备更成熟的复杂场景理解能力,通过这种方式给它们预设一个安全逻辑进行兜底之后,这一整套技术就更安全了。
所以大家也不难想象,现在的端到端大模型技术其实就是不断需要算力去“喂”,以供它学习分析。至于怎么样去喂,学习能力如何就是各家车企能力表现出来的差异化程度了。

高阶智驾试金石——车位到车位
- 车位到车位的场景成为需求
我们此前关注的城区 NOA 和高速 NOA 场景都是带有区域局限性的;只能在城区/高速下体验。伴随着今年很多智驾竞争主要围绕端到端技术的落地而展开,因此“车位到车位”这个概念也成为了新兴的实用场景划分。

它对比之前的特定场景 NOA 体验,“车位到车位”主要表现在减少智驾断层的情况,可以应对闸机、高速出入口、车位、泊车等多种场景的融合。
- 车位到车位带来哪些优势?
车位到车位理解非常简单,其实就是打通点到点的智驾全场景,能做到这一点要兼容非常多因素的考虑,例如除了基本的城区领航以及高速领航的场景之外还要完成车位泊入泊出、闸门的识别、车辆本身的自动启停等等。
所以车位到车位最大的优势就是打通了所有的智驾场景,并做到了全面兼容;随时随地开启即用。这种场景形式也是人们对于智能辅助驾驶最初的设想。

另外,车位到车位是端到端技术的体现,如今的车位到车位要比以往的智能领航更聪明、更智能,融合了大模型之后会在智驾的底层逻辑生成更多效率更高的驾驶习惯,例如行车中更积极主动避让的“利他性”这些都仿佛是一位老司机不断学习的过程。
除此之外车位到车位还会带来更安全的算法几余,像理想 E2E+VLM 版本中就能对路面的积水进行大模型拓补识别,让行车更安全。因此车位到车位不仅仅是场景上的简单切换,而是整套端到端大模型运用后得出一种更成熟的智能全场景领航技术。
- 车位到车位的较量持续开展
目前国内的车企们针对车位到车位的辅助驾驶能力依然在不断推进中,此前理想汽车就基于端到端+VLM 的车位到车位功能已经在 10 月 23 号的 OTA 6.0 版本中开启了大规模的推送。

小米汽车基于无图 NOA、用户驾驶数据训练和 VLM 视觉语言大模型相结合的端到端技术,同样拥有车位到车位功能。而该方案也将于 12 月底推送先锋版。小鹏在今年的1024 科技日中宣布 AI 天现 5.4.0 正式开启公测,不分场景,全量使用端到端大模型技术。
纵观来看,现在的智驾在辅助方向上增添了不少主观的能性,再也不是一套循规蹈矩的系统,接入大脑后的智驾也将会在时代的长河中不断成长越来越聪明。
当下,“端到端”已成为车企智能驾驶技术的主流方向,是通向 L4 级自动驾驶的起点,未来也将会在商业价值层面用有更强的可能性。

作者结语 ... /
纵观 2024 年度的新能源汽车市场可以看到,智能化的迭代依然在持续升级;无论是车机系统还是智驾方面都在同步进行。另外大家也可以明显感受目前的新能源智能化正在不断趋向于合理。
人们对于智能化的需求不断变大,从之前的疑问,到尝试,再到惯用......但是,对于智能化的摸索如今还是螺旋上升的阶段,我相信未来对于智能的要求以及使用的场景会不断进步。
最后希望 2025 新的一年,车企们能给我们在智能上带来更亮眼的创新,更乐趣,更便捷的体验,在这里也祝大家新年快乐,阖家平安,万事如意。
 {{detailStore.integral}}
{{detailStore.integral}}





 积分赞赏人员
积分赞赏人员
 添加咨询车型
添加咨询车型









 新出行
新出行
 {{data.limitTimeActivitySearchKeyword}}
{{data.limitTimeActivitySearchKeyword}}